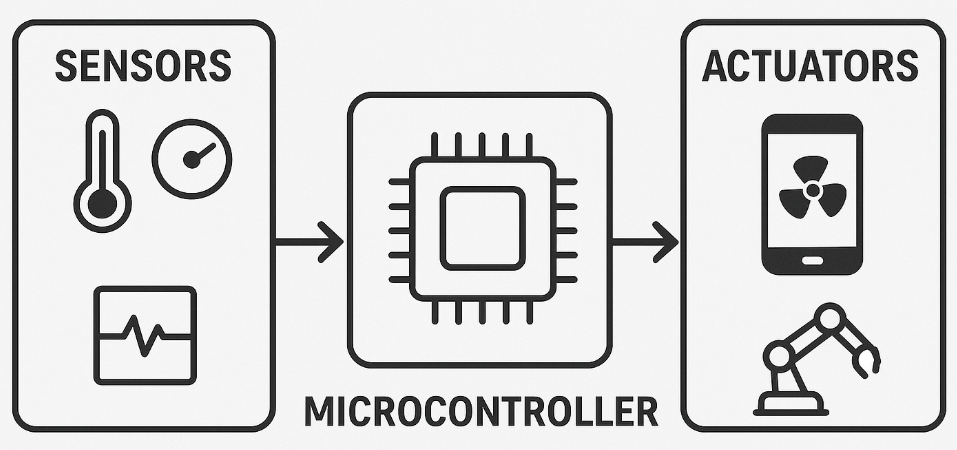
Deskripsi Singkat Matakuliah Mata kuliah kontrol komputasi bergerak merupakan matakuliah yang menerapkan metode pembelajaran Project base learning (PjBL)/ Case base learning (CBL), yang mana mata kuliah ini memiliki capain pembelajaran prototype system control. Dalam pembelajarannya mata kuliah ini akan mempelajarai sensor, mikrokontroller, desain
rangakaian system dan rangkaian, komunikasi data, serta mobile application. Untuk project pada mata kuliah ini didapatkan melalui studi literatur dan kunjungan ke dunia industry
rangakaian system dan rangkaian, komunikasi data, serta mobile application. Untuk project pada mata kuliah ini didapatkan melalui studi literatur dan kunjungan ke dunia industry
- Pengajar: Novi H Sudibyo
- Pengajar: sistem komputer2